

Ebben a cikksorozatban bemutatom hogyan kell 3D-ben beszkennelni a világot egy drónnal és térképet készíteni belőle.
Ma a Drone Harmony használatát fogom bemutatni, mivel az kompatibilis a DJI Spark-ommal és a legtöbb DJI drónnal.
Ha még nem tetted volna meg olvasd el a sorozat előző részét: https://minerktech.blog.hu/2020/04/13/dronos_terkepeszet_1_alapok
Terepszemle
Meg kell néznünk milyen a terep, amit fel szeretnénk mérni. Milyen magas a legmagasabb pontja? Vannak e villanyvezetékek, TV tornyok vagy bármi zavaró a közelben? Mekkora szokott lenni a szél? Honnan lehetne felszállni és leszállni?
Tervezés
Először is meg kell nézni mekkora területet tud a drónunk egy repüléssel felmérni. Ennek kiszámítása elég hosszadalmas, ezért ez egy másik cikk tárgya lesz. Legyen elég annyi, elsőre 0.1 km2-nél nagyobb területtel senki ne próbálkozzon.

Aztán kijelöljük a területet a robotpilótában, amit fel szeretnénk mérni.
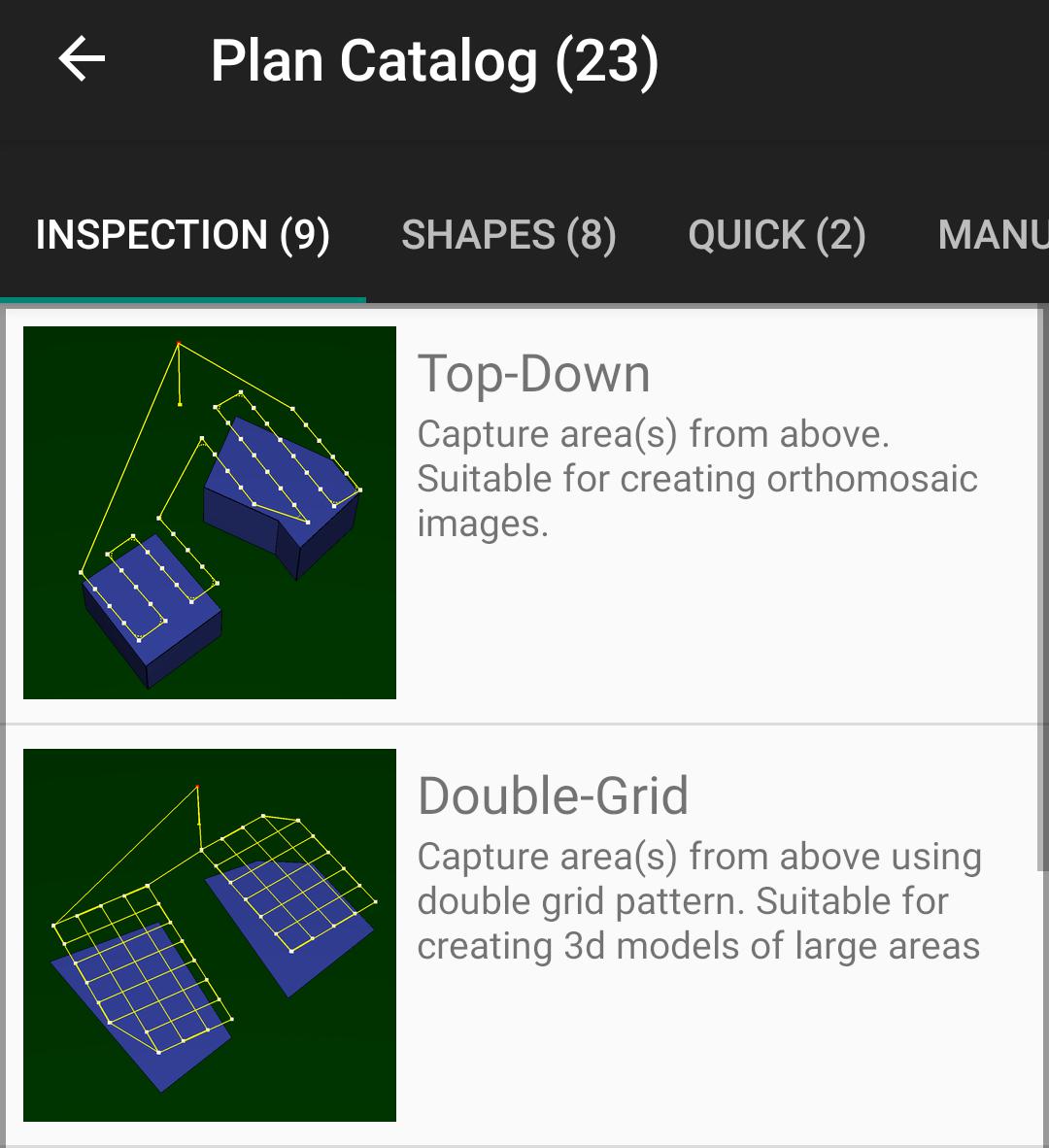
Majd a jobb oldali plusz jellel kezdhetjük el az útvonal tervezését. Két féle opciónk is van térképészeti felmérésre: Top-Down és Double-Grid. Az első csak egyszer járja be a területet, így rosszabb minőségű 3D modellt eredményez, de nagyobb terület felmérhető vele. A második kétszer, ezért jobb lesz a 3D modell, de kisebb terület mérhető fel vele egy töltéssel. Én most a Double-Grid-et választom, mivel elég kicsi, de részletes a területem.
Majd ki kell választanunk a felszállási és a leszállási pontot.
És jönnek a gondok egy kezdő számára mivel egy nagyon részletes beállítások menüvel néz most szembe. Én minden menüpontot egyesével be fogok most mutatni, mivel itt a legfontosabb, hogy mindent jól állíts be.
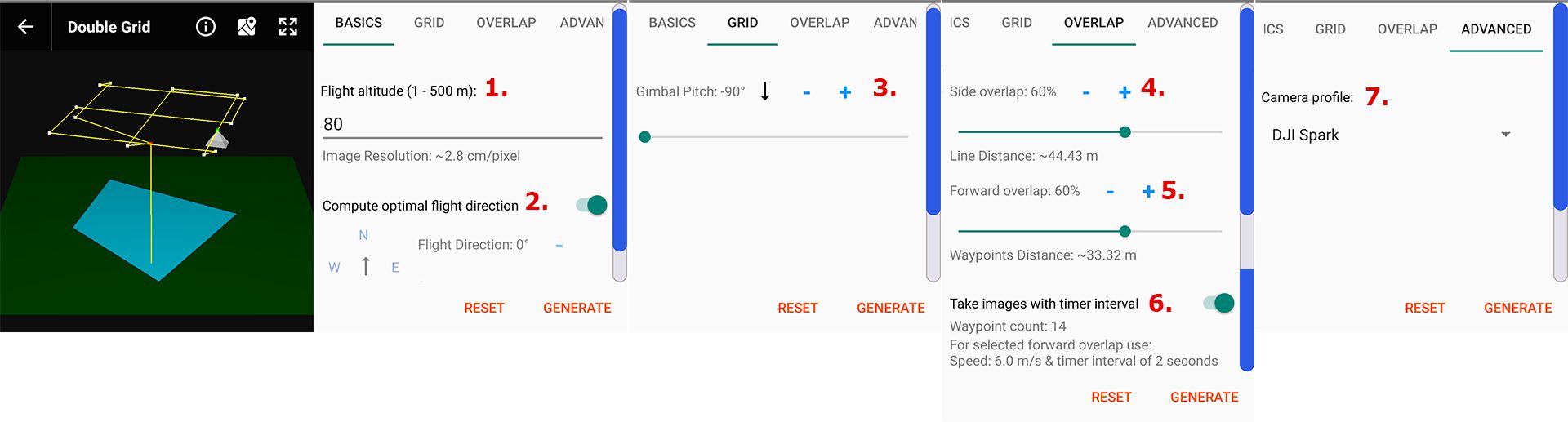
- Flight Altitude (repülési magasság): Ez talán a legfontosabb. Minél magasabbra mész annál kisebb a készülő képek részletessége, de annál kisebb utat kell bejárni a gépnek, így annál nagyobb területet tudsz felmérni egy töltéssel. Általánosságban 80-120 m közé kell beállítani. Ha ez alá mész lehet, hogy torzulni fog a kép, ha felé a szél tud problémákat okozni. Én a Spark-al szoktam 50 m-en is repülni, mivel nagyon kicsi a kamerája felbontása (8MP), de egy ilyen mérés mellé mindig csinálok egyet magasabban is, hogy az alapján a torzítás kompenzálható legyen.
- Compute optional flight direction (számítsa ki az optimális repülési irányt): Ezt hagyd bekapcsolva.
- Gimbal Pitch (gimbal állása): Azt adja meg merre nézzen a kamera -90fok (lefele) megfelelő a felméréshez.
- Side overlap (oldalirányú lefedettség): Azt adja meg hány méterenként legyenek a bejárás vonalai. 60%-on szoktam hagyni, ha nincs sok épület a képen.
- Forward overlap (elülső lefedettség): ezzel az útpontok (waypoints) távolságát adhatjuk meg, ez is maradhat 60%-on.
- Take images with timer interval (időzítő alapján készítse a képeket): Annyit tesz, hogy megadott időközönként készítsen képet a pályán vagy hozzon létre waypoint-okat és azokon készítse el a képeket. Én alapvetően bekapcsolva szoktam hagyni, mivel az időzítős megoldás sokkal kevesebb waypoint-ot eredményez, így gyorsabban feltöltődik a drónba. De a waypoint-os megoldás van, hogy valamivel kevesebb képet eredményez ez gyorsíthatja egy kicsit a feldolgozást, de például a Spark memóriájában el sem fér egy nagyobb waypoint-os útvonal szóval maradok a bekapcsoltnál.
- Camera profil (kamera profil): Válasszuk ki a listából a saját drónunkat.
Majd rányomunk, hogy generate és meg is vagyunk a tervezéssel. Ideje menteni egyet, hogy el ne vesszenek terveink.
Repülés
Majd Jöhet a repülés. Irány ki a terepre, amiről a tervet készítettük. Bekapcsoljuk a drónt majd elindítjuk a robotpilótát és betöltjük a terveket.

Kiválasztjuk jobboldalt a kívánt útvonaltervet majd megnyomjuk a nagy sárga gombot és egy újabb beállítások menüben találjuk magunkat.
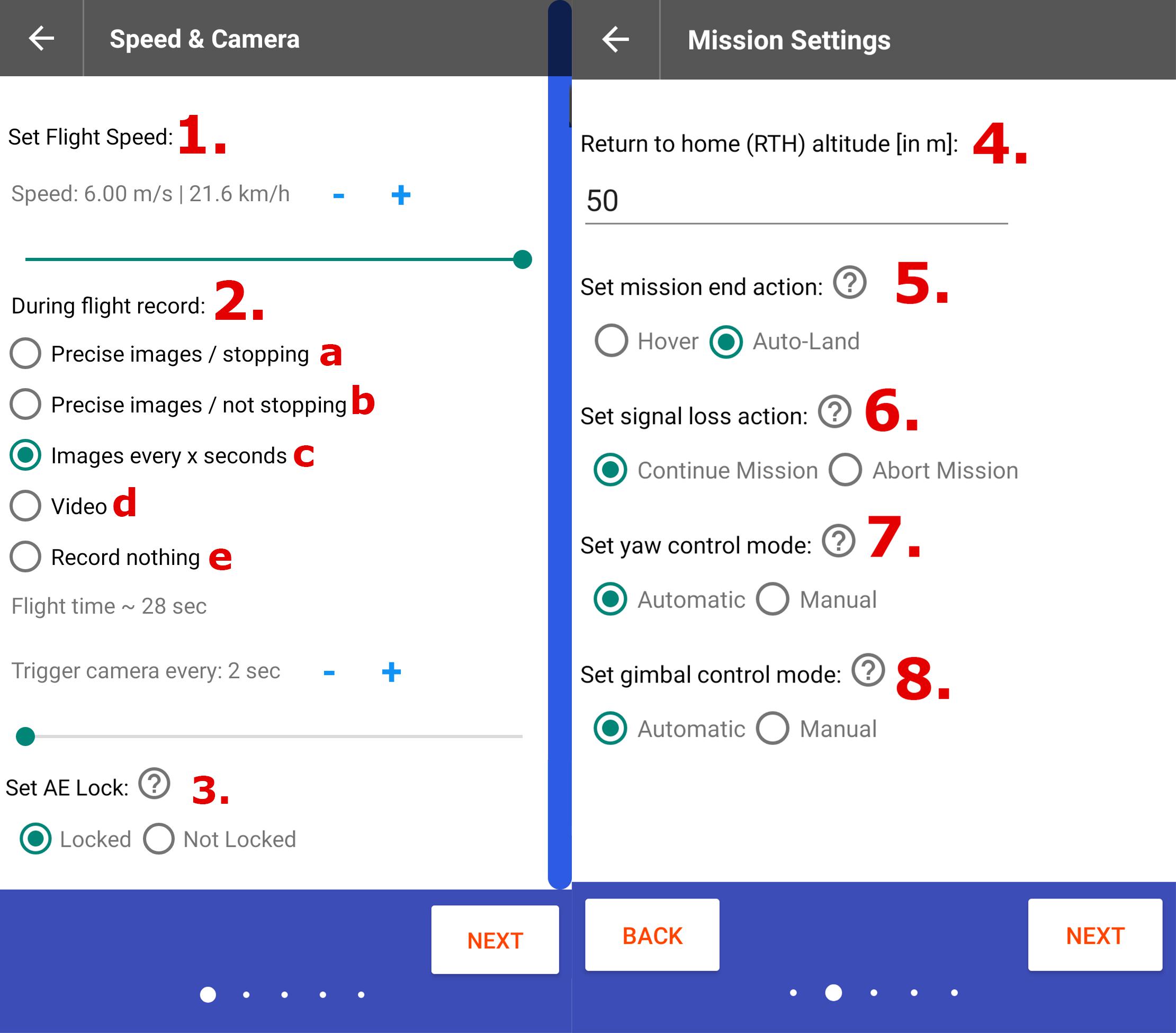
- Set Flight Speed (repülési sebesség): ez nyugodtan lehet maximális
- During flight record (Repülés alatt): Ez egy nagyon fontos rész, itt állítjuk be mi alapján készítsen fotót vagy videót. Az alábbiak közül én kettőt szoktam használni. a másodikat, ha waypointokat állítottam be a tervezésnél, a harmadikat pedig, ha az időzítőt választottam.
- Precise image / stopping (precíziós fotó / megállás): Az előre beállított waypoint-oknál megáll és képet készít.
- Precise image / not stopping (precíziós fotó / megállás nélkül): Az előre beállított waypoint-oknál képet készít megállás nélkül.
- Image every x seconds (képet készít x másodpercenként):
- Video: Ezt szerintem nem kell elmagyaráznom
- Record nothing (semmit sem rögzít): Nem vesz fel semmit.
- Set AE lock (automatikus expozíció rögzítés): Ez annyit tesz, hogy a képek fényességét csak egyszer az első képen állítsa be vagy minden képre külön. Próbáltam mindkét beállítást és én Locked-on szoktam hagyni. Így némely kép fényesebb, mint a másik, de a valósághoz szerintem ez áll közelebb.
- Return to home (RTH) altitude (hazatérési magasság): Ezt minden felszállás előtt ellenőrizni kell, hogy 5-10 méterrel a legmagasabb pont fölé legyen állítva, akkor is, ha a gép a felmérést magasabban végzi, mivel, ha feltámad a szél a lehető legalacsonyabban érdemes hazajönni.
- Set mission end action (mit tegyen a gép a repülés végén): Én a leszállást szoktam bejelölni, mivel ott szoktam leszállni, ahonnan felszállok.
- Set signal loss action (mit tegyen a gép jelvesztéskor): Én, ha teljesen a drónra van bízva a művelet a Continue Mission opciót szoktam választani, ha függ a távirányítótól az Abort-ot.
- Set yaw control mode (fordulás módjának beállítása): Ez maradhat automatikusan.
- Set gimbal control mode (gimbal módjának beállítása): Ez is maradhat automatikusan.
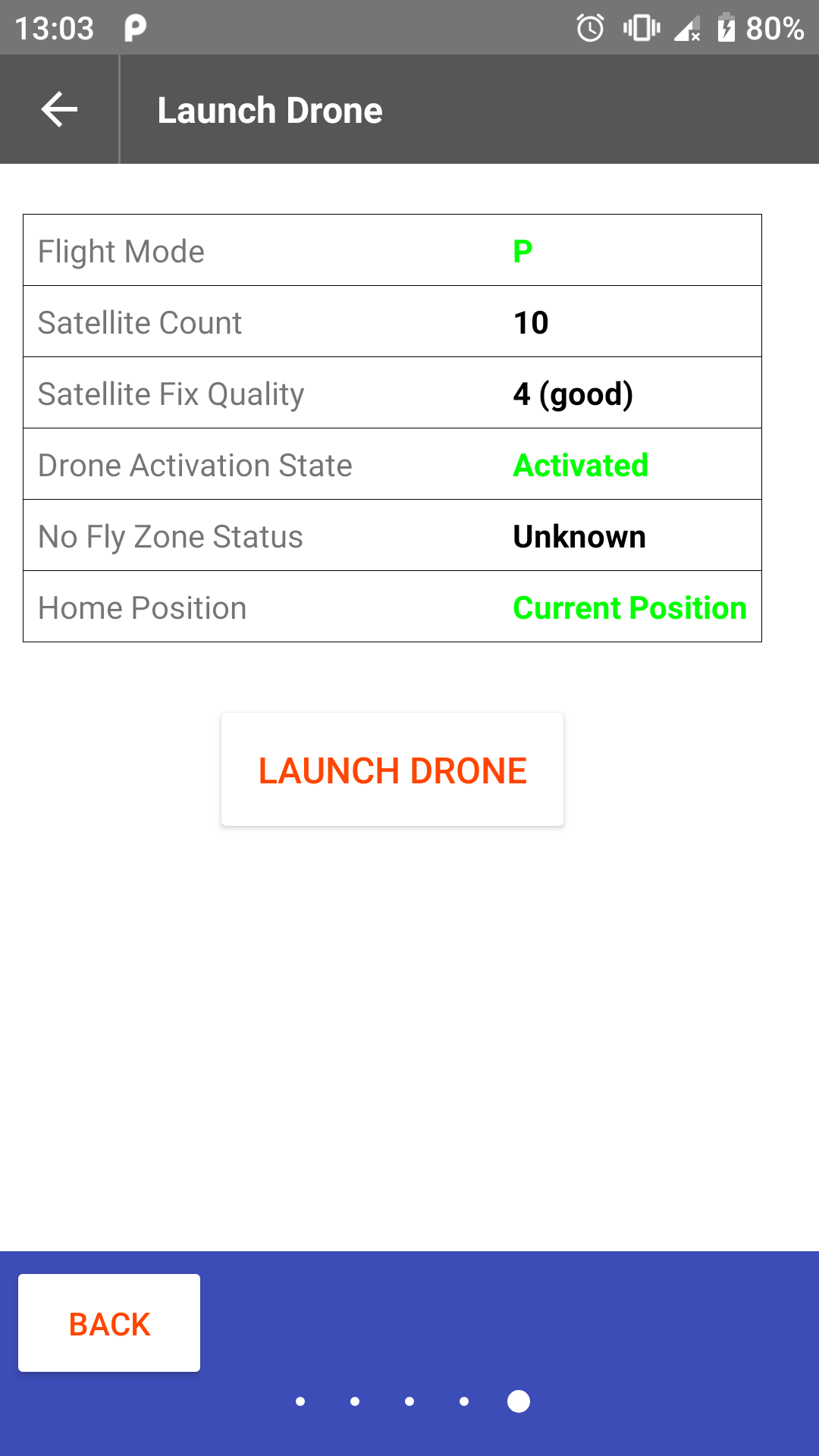
Egy gyors áttekintő a repülésről, biztonsági értesítés és már kész is állunk a drón indítására. Az utolsó oldalon rányomunk a Launch Drone gombra és ha mindent jól csináltunk feltöltődnek az adatok a drónra, majd automatikusan lerepüli a tervezett útvonalat.
Ezzel véget is ért a terepmunka a drónnal és ez a cikk is. De még nincs vége a cikksorozatnak nemsokára érkezik a fotók feldolgozásáról szóló rész.
Legközelebb megnézzük milyen programokkal érdemes feldolgoznunk a képeket. Ha nem akarsz lemaradni cikkeimről kövesd facebook oldalam: facebook.com/minerktech/
A cikksorozat még nem ért véget! Íme a következő része: https://minerktech.blog.hu/2020/04/15/dronos_terkepeszet_3_resz





